Das Frequenzkennlinienverfahren (auch Frequenzgangverfahren genannt) beschreibt in der Regelungstechnik ein Werkzeug für den Reglerentwurf. Durch die Synthese der zugrundeliegenden Frequenzkennlinie über einen Regler können Anforderungen an den geschlossenen Regelkreis realisiert und somit Optimierungsziele verfolgt werden. Als Grundlage für das Frequenzkennlinienverfahren dient das Bode-Diagramm, welches auch als Frequenzkennliniendiagramm bezeichnet wird.
Der Sinn dieses Reglerentwurfs ist es, den Frequenzgang durch Hinzufügen von Übertragungsgliedern recht unkompliziert beeinflussen und die Änderung des Frequenzgangs in jedem Zwischenschritt visuell kontrollieren zu können. Damit ist das Verfahren ein visuell-geometrisches Werkzeug zur Bestimmung der Reglerparameter im Frequenzbereich.
Gleichzeitig stellt es eine Alternative zu weiteren, in der Praxis üblichen, Reglersynthesemethoden wie dem Betragsoptimum und dem Wurzelortskurvenverfahren dar.
Motivation
Eine allgemeine Übertragungsfunktion in Polarform eines dynamischen Systems kann wie folgt dargestellt werden:
mit
und
sowie
- , und .
Die kritischen Stellen (Pole bzw. Nullstellen) der Übertragungsfunktion sind gedanklich über einen Zeiger mit der Kreisfrequenz (welcher über den blauen Kasten symbolisiert wird) auf der -Achse zu verbinden. Der Winkel charakterisiert dabei den Winkel eines Zeigers zur realen Achse (Abszisse). Es sollen nur die Frequenzen , also der blaue Zeiger bei der einfach reell kritischen Stelle betrachtet werden. Nun wird die Frequenz, beginnend von bis erhöht, sodass sich der Zeigerpfeil entlang dem aktuellen Wert von , ähnlich zu einem Fahrstuhl, nach oben in Richtung bewegt. Der Zeiger nimmt für einen Winkel von 90° und eine unendlich große Länge an. Die Überlegungen lassen sich analog auch auf negative Kreisfrequenzen übertragen.
Pole
Ein Pol der Übertragungsfunktion kann isoliert als betrachtet werden, wobei sein Betrag als dargestellt werden kann.
Wie in der Funktion erkennbar, verringert sich der Betrag mit zunehmender Frequenz (und somit Zeigerlänge), unabhängig davon, ob der Pol links (rote Markierung) oder rechts (grüne Markierung) der imaginären Achse liegt.
Der Betrag des Pols kann in Dezibel wie folgt dargestellt werden:.
Für kleine Frequenzen ist der Betrag (in Dezibel) für einen Pol nahezu konstant und sinkt dann für Frequenzen mit 20 dB/Dekade.
Der Winkel für Pole mit negativem bzw. positiven Realteil ist .
Der Zeiger für den Pol mit negativem Realteil startet im Winkel für und läuft bis für (in das Argument von G(s) geht der Zeigerwinkel jedoch negativ ein, daher ist die Phase für ). Die Phase des Systems verringert sich für einen Pol mit negativem Realteil, also mit zunehmender Frequenz. Ein Pol rechts der imaginären Achse hingegen verändert den Zeigerwinkel asymptotisch um −90° für , da er sich im Uhrzeigersinn dreht (die Phase erhöht sich wegen des negativen Vorzeichens im Argument von G(s) jedoch kontinuierlich auf 90°, alternativ steigt die arctan-Funktion vom Pol um 90° von −180° auf −90° für ). Ein Pol im Ursprung ändert für alle Frequenzen die Phase konstant um −90°: für .
Nullstellen
Eine Nullstelle der Übertragungsfunktion hingegen kann isoliert als betrachtet werden.
Dann ist ihr Betrag:
- .
Mit zunehmender Frequenz verlängert sich der Zeiger und damit auch der Betrag von G(s) (alternativ: der Betrag von ), da die Nullstelle im Zähler von G(s) steht. Dies ist unabhängig, ob sich die Nullstelle links (rote Markierung) oder rechts (grüne Markierung) der imaginären Achse befindet.
Der Betrag der Nullstelle in Dezibel ist:
- .
Für kleine Frequenzen ist der Betrag für einen Nullstelle nahezu konstant (in Dezibel) und steigt dann für Frequenzen mit 20 dB/Dekade.
Der Winkel beträgt:
- .
Die Nullstelle links der imaginären Achse startet mit dem Winkel für und läuft bis für (die Phase nimmt für steigende zu und ist somit für ). Bei einer Nullstelle rechts der imaginären Achse ist es jedoch umgekehrt. Hier verändert sich der Winkel von für auf für , der Winkel fällt also um 90°, sodass auch die Phase von G(s) um 90° asymptotisch abfällt. Diese Verhalten kann man auch anhand der Argumentfunktion nachvollziehen.
Konjugiert komplexe Stellen
Die Winkel zweier konjugiert komplexen kritischen Stellen werden addiert. Bei konjugiert komplexen Nullstellen oder Polen links der imaginären Achse ergibt die Summe der Winkel bei daher 0° (beide blaue Pfeile). Für ist die Winkelsumme für kritische Stellen links der imaginären Achse 180°, da sich beide Zeiger asymptotisch 90° annähern.
Zusammenfassend kann für die Auswirkung einer kritischen Stelle in der Übertragungsfunktion folgendes Schema festgehalten werden:
Pole wirken im geschlossenen Regelkreis in der Regel destabilisierend (phasensenkend) und Nullstelle stabilisierend (phasenhebend). Es ist zu empfehlen, die Ordnung des Reglers niedrig zu halten. Denn weitere Pole erschweren nicht nur die Stabilisierung der Strecke, sondern verschlechtern auch die Dynamik (s. unter Wurzelortskurvenverfahren).
Anforderung an den geschlossenen Regelkreis
Meist werden unterschiedliche Gütekriterien an den, über den Regler, geschlossenen Regelkreis gestellt. Die Stabilität stellt hierbei meist eine obligatorische Anforderung dar. Darüber hinaus wird von der Sprungantwort gefordert, dass sich diese möglichst schnell und gut gedämpft dem Sollwert annähert (also ein gutes dynamisches Verhalten aufweist).
Weiterhin kann ein I-Glied vor der Störung die Forderung nach stationärer Genauigkeit erfüllen.
Es wird angenommen, dass der geschlossene Regelkreis (nur) ein dominantes konjugiert komplexes Polpaar besitzt, denn dann lässt er sich als ein PT2-Glied approximieren: mit und .
Der Frequenzgang ergibt sich somit als: .
Sein Betrag in Dezibel ist daher: .
Allgemein können dann verschiedene Kennzahlen für die Charakterisierung des dynamischen Verhaltens des Systems im Frequenzbereich betrachtet werden:
- Durchtrittsfrequenz : Die Kreisfrequenz, für die gilt mit . Sie stellt ein Maß für die Schnelligkeit des Systems dar, denn je höher die Durchtrittsfrequenz ist, desto schneller reagiert der Regelkreis.
- Bandbreite : Die Kreisfrequenz, an der Amplitudenbetrag des Systems unterhalb der −3dB-Linie fällt. Wie auch die Durchtrittsfrequenz stellt sie ein Maß für die Schnelligkeit des Systems dar.
- Resonanzfrequenz : Die Kreisfrequenz, bei der die Amplitude der äußerlich angeregten Schwingung maximal wird.
- Phasenwinkel : Phasenlage des Systems an der Bandbreitenfrequenz .
- Phasenreserve : Phasendifferenz zwischen −180° Phasenverschiebung und der Phasenlage des Systems an der Stelle der Durchtrittsfrequenz: . Sie beschreibt auch als ein Maß den Abstand zur Stabilitätsgrenze. Eine Verkleinerung der Phasenreserve sorgt für eine Zunahme der Schwingneigung bzw. des Überschwingens.
- Amplitudenerhöhung : Die Differenz zwischen der 0dB-Linie sowie dem Maximum der Amplitudenverstärkung (bei der Resonanzfrequenz ). Sie stellt ein Maß für die Dämpfung des Systems dar. Das Maximum der Amplitude lässt sich über die erste Ableitung berechnen: . Dann ergibt sich , was eine reelle Lösung für besitzt, falls . Setze in für ein. Damit ergibt sich .
Vor der Synthese des Reglers sind mögliche Gütekriterien aus dem Zeitbereich gegebenenfalls noch in den Frequenzbereich zu übersetzen, damit der Regler so ausgelegt werden kann, dass der geschlossene Regelkreis die genannten Anforderungen erfüllt.
Die Überschwingweite beschreibt im Zeitbereich, während des Übergangprozesses von einem alten in einen neuen Verharrungszustand, die maximale Abweichung der Regelgröße vom Sollwert.
Für ein PT2-Glied kann festgelegt werden, dass die Überschwingweite einen bestimmten Grenzwert der Überschwingweite nicht übersteigen soll. Somit kann als ein Maß für die minimal erforderliche Dämpfung betrachtet werden.
Die Sprungantwort des PT2-Gliedes ist: , im Zeitbereich also .
Nun lässt sich der Maximalwert von über seine Ableitung bestimmen. Damit entspricht das Maximum von der Überschwingweite, die wie gefordert unter einem Grenzwert liegen soll: .
Umformen nach der Dämpfung , ergibt die notwendige Mindest-Dämpfung des PT2-Glieds:
- .
Da die Dämpfung nun bestimmt werden kann, wird im letzten Schritt die für das Frequenzkennlinienverfahren notwendige Phasenreserve bestimmt. Diese kann für das PT2-Glied approximiert werden als (für ).
Reglertypen
Bode-Diagramme eignen sich besonders zur Darstellung einzelner Übertragungsglieder, die in Reihe geschaltet sind. Denn ihr Frequenzgang kann grafisch durch Überlagerung einfach auf den Frequenzgang der anderen Glieder addiert werden.
Der Amplituden- und Phasengang des offenen Regelkreises ergibt sich für die Strecke und mehrerer in Reihe geschalteter Reglerglieder wie folgt:
- ,
- .
Die Gesamtübertragungsfunktion ergibt sich als Addition der einzelnen Übertragungsfunktionen, während im Frequenzbereich eine Multiplikation dieser vorgenommen wird.
Der allgemeine Phasenkorrekturregler lautet: .
Sogenannte Lead-Glieder heben die Phase (in einem bestimmten Frequenzbereich) sowie den Amplitudengang asymptotisch an. Für sie gilt , sie stellen dabei eine spezielle Form des PDT1-Reglers dar. Das Maximum der Phasenanhebung sollte auf die Durchtrittsfrequenz gelegt werden. Dem gegenüber steht das Lag-Glied, welches die Phase (in einem bestimmten Frequenzbereich) und den Amplitudengang absenkt.
Für Lag-Glieder gilt . Hierbei soll im Bereich tiefer Frequenzen eine möglichst hohe Verstärkung erzielt, aber die Durchtrittsfrequenz wenig verändert werden. Häufig treten aber in gewissen Frequenzbereichen durch das Lag-Glied unerwünschte Phasenabsenkungen auf.
Der Frequenz- und Amplitudengang des Übertragungsgliedes sind entscheidend für die Festlegung, welcher Regler eingesetzt werden soll. Häufig wird auch eine Kombination mehrerer Reglertypen angestrebt. Neben dem Phasenkorrekturregler können noch weitere LZI-Übertragungsglieder als Regler eingesetzt werden (PI-, PD-, PID-Regler).
Entwurfregeln
Für den Reglerentwurf wird von einer allgemeinen Strecke der Form mit , und , , , , ausgegangen.
Mit der Ausnahme von zwei Polen im Ursprung sollen alle Pole und Nullstellen der Strecke innerhalb der linken s-Halbebene liegen.
Der untere Frequenzbereich kennzeichnet im Bode-Diagramm das stationäre Verhalten, der mittlere hingegen den charakteristischen Einschwingvorgang und die Dynamik des geschlossenen Regelkreises. Mit dem Ziel, hochfrequente Störungen zu unterdrücken, ist es meist erwünscht, im hohen Frequenzbereich einen zügigen Amplitudengangabfall zu erreichen.
Zuerst wird der untere und danach der mittlere Frequenzbereich angepasst. Die Entwurfsregeln für das Frequenzkennlinienverfahren erfolgen daher nach folgendem Schema:
- Im ersten Schritt wird durch einen Verstärkungsfaktor (P-Regler) der Amplitudengang angehoben, um die bleibende Regelabweichung zu reduzieren. Alternativ dazu bietet sich auch das Hinzufügen eines I-Anteils an (ersetzt im zweiten Schritt das Lag-Glied).
- Durch den Verstärkungsfaktor wird auch die Durchtrittsfrequenz erhöht, was für ein höheres Überschwingen sorgt. Daher muss diese durch ein Lag-Glied wieder zurückgedreht werden (abhängig von der Eckfrequenz des Lag-Gliedes). Die Nullstelle des Lag-Gliedes sollte mit einem dominanten stabilen Pol der Strecke übereinstimmen.
- Nun wird versucht, die notwendige Phasenreserve zu erreichen und die Dynamik im mittleren Frequenzbereich zu verbessern. Hier bietet sich wiederum ein Lead-Glied an (bzw. ein PD-Glied). Die Nullstelle dieses Reglergliedes sollte einen weiteren dominanten Pol (nur einen stabilen) der Strecke kompensieren. Damit ein langsames Einschwingen der Sprungantwort auf den stationären Endwert vermieden wird, sollte 1 Dekade um die Durchtrittsfrequenz die Betragskennlinie des offenen Regelkreises mit mind. 20 dB/Dekade abfallen. Es ist auch möglich, die Schritte 2 und 3 zu tauschen.
- Der geschlossene Regelkreis sollte abschließend in einer Simulation nochmals überprüft werden. Hierbei können die Reglerparameter noch feiner adjustiert werden, ggf. muss der Entwurfsprozess mehrfach durchlaufen werden. Wird das gewünschte Ziel nicht erreicht, sind unter Umständen weitere Reglertypen in Betracht zu ziehen.
Alternativ zu den Phasenkorrekturgliedern kann der Entwurf auch über einen PID-Regler anhand von zwei Faustregeln erfolgen:
- Wähle die PID-Parameter , so, dass die beiden dominanten Pole in der Strecke kompensiert werden. Dies erhöht die Dynamik des geschlossenen Regelkreises maßgeblich. Falls kein D-Anteil verwendet werden soll (reiner PI-Regler), wird über nur der dominanteste stabile Pol der Strecke kompensiert. Falls die Streckenzeitkonstante etwa alle ähnlich groß sind, lauten die Entwurfsregeln wie folgt:
- Pi-Regler:
- PID-Regler: und . Denn (für kleine ) gilt näherungsweise: .
- Im letzten Schritt soll über die Wahl eines passenden Verstärkungsfaktors des Reglers eine ausreichende Phasenreserve sichergestellt werden.
Bisher wurde der Reglerentwurf nur für das Führungsverhalten des Regelkreises allgemein betrachtet. Analog dazu ist es auch möglich, die Reglersynthese speziell für ein optimales Störverhalten des geschlossenen Regelkreises auszulegen.
Beispielrechnung (Entwurf über Lead/Lag)
In diesem Beispiel soll das Frequenzkennlinienverfahren über Lead/Lag-Regleranteile veranschaulicht werden.
Ausgehend von der Übertragungsfunktion einer beispielhaften Strecke, welche aus einem PT2- und einem PI-Glied mit den Parametern , , , besteht, wurden weitere Entwurfsvorgaben an den geschlossenen Regelkreis festgelegt: die stationären Verstärkung , die Anstiegszeit und die Phasenreserve von .
- Damit ist die Verstärkung des offenen Kreises und der Verstärkungsfaktor des Reglers . Der offene Kreis besteht nun aus der Strecke ergänzt um einen P-Regler . Man geht von folgender Approximation aus, sodass sich die Durchtrittsfrequenz berechnen lässt: .
- An der Stelle der Durchtrittsfrequenz lässt sich die Phase des offenen Kreises mit Hilfe eines Bode-Diagramms oder mathematisch berechnen. Der Betrag ist , sodass die Phase angehoben und der Betrag gesenkt werden muss. Es wird ein Lead-Regler gewählt, sodass die Phase an der Durchtrittsfrequenz um angehoben wird. Das heißt, dass die Phase nicht nur auf die geforderte Phasenreserve, sondern zusätzlich um 15° angehoben wird, damit es durch ein späteres Lag-Glied wieder abgebaut werden kann. Je nach Strecke und Güteanforderung, kann dieser Phasenaufschlag auch einen anderen Wert als 15° annehmen. Für den Lead-Regler gilt: mit . Die maximale Phasenanhebung soll auf der Durchtrittsfrequenz liegen, sodass und berechnet werden können. Nun lässt sich die neue Übertragungsfunktion des offenen Regelkreises aufstellen: . Der neue Betrag und die Phase an der Durchtrittsfrequenz ergeben sich zu: und .
- Im letzten Schritt wird zusätzlich ein Lag-Glied mit in die offene Kette eingefügt, damit die Phase um die offenen und der Betrag um gesenkt werden können. Um die Parameter zu bestimmen, forme folgende Gleichungen um nach und . Damit ist die offene Übertragungsfunktion: .
Jedoch ist das Einschwingen recht langsam und das Überschwingen recht hoch. Durch andere Entwurfsvorgaben ließe sich die Dynamik des geschlossenen Regelkreises noch weiter verbessern.
Beispielrechnung (Entwurf über PI-Regler)
Im zweiten Beispiel soll anstatt eines Lead-/Lag-Gliedes ein PI-Regler eingesetzt werden.
Es wird von der Strecke
ausgegangen, die durch einen PI-Regler der Form
(anfangs wird noch angenommen) geregelt werden soll.
Die geforderte Phasenreserve beträgt in diesem Beispiel 60°, denn .
- Nach der ersten Faustregel lässt sich der Regelparameter auf festlegen. Dann ergibt sich die offene Übertragungsfunktion zu .
- Im Bode-Diagramm lässt sich erkennen, dass zu der Phase von −120° die Kreisfrequenz gehört, der Betragsverlauf liegt bei ca. 5 dB. Es wird hingegen nun über die Anpassung der Verstärkung gefordert, dass gilt. Daraus folgt, dass die Betragskennlinie um 5 dB abgesenkt werden muss. Dies erreicht man über .
Weitere Methoden für den Reglerentwurf sind das Betragsoptimum- sowie das Wurzelortskurvenverfahren. Nach dem Betragsoptimum ergeben sich für die gegebene Strecke und den PI-Regler die Reglerparameter und , für das Wurzelortskurvenverfahren hingegen: und .
Der geschlossene Regelkreis schwingt zwar schneller ein, wenn die Verstärkung zunimmt, dadurch erhöht sich aber auch das Überschwingen sowie der Stellgrößenverlauf. Letztendlich sind der Verlauf der Sprungantwort und der Stellgröße aber immer von den vorgegebenen Gütekriterien abhängig.
Praxiseinsatz
Vorteile des Frequenzkennlinienverfahrens:
- Mathematisches Modell nicht unbedingt notwendig, der Frequenzgang kann ausreichend über Frequenzgangmessung ermittelt werden
- Auch für digitale Regelungssysteme geeignet
- Leicht ohne höhere mathematische Verfahren durchführbar
- Intuitive Betrachtung über das Bode-Diagramm inkl. Stabilitätsbeurteilung
Nachteile des Frequenzkennlinienverfahrens:
- Durch Ablesen an der Frequenzkennlinie ungenau bzw. keine analytische Optimierung
- Meist mehrfache Durchführung notwendig, falls mehrere Reglerglieder verwendet werden (iteratives Verfahren)
- Für nichtlineare Systeme und viele MIMO-Systeme meist ungeeignet
- Keine direkte Berücksichtigung des Stellgrößenverlaufs in Auslegung
- Hauptsächlich nur bei stabiler Strecke und sprungförmigen Störungs- und Führungsgrößen durchführbar
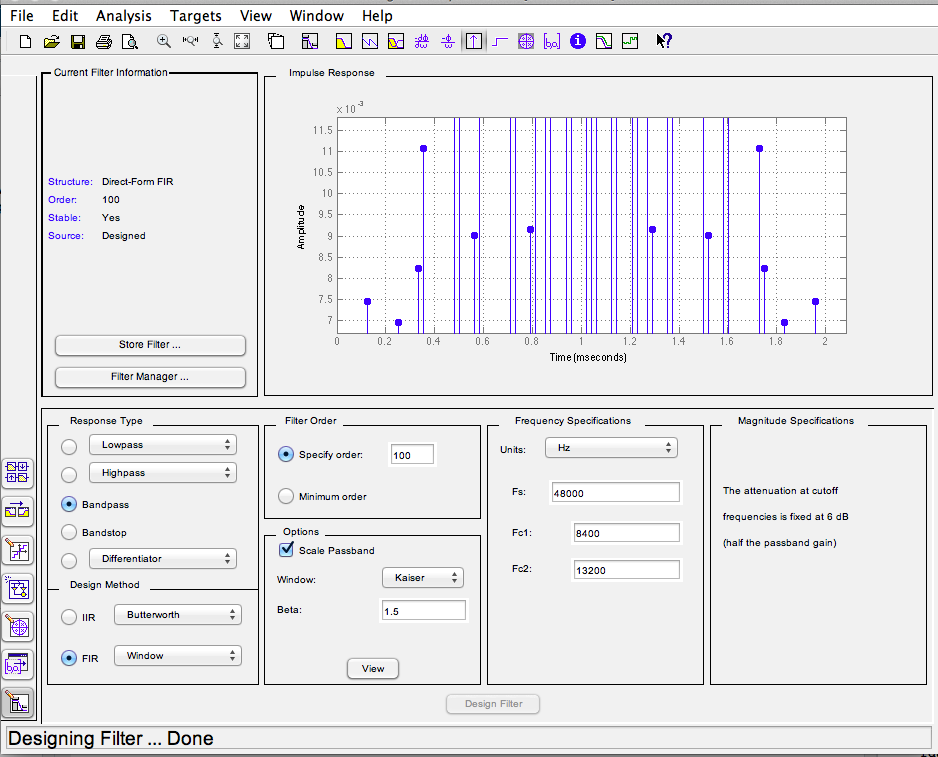
Während Mitte des 20. Jahrhunderts in der Regelungstechnik noch Amplituden- und Phasenlineale zur Auslegung der Frequenzkennlinien verwendet wurden, wird dies mittlerweile computerbasiert berechnet. Das Programm Matlab bietet beispielsweise hierbei Verfahren zur Auslegung der Frequenzkennlinie.
Literatur
- Ulrich Konigorski: Skript Systemdynamik und Regelungstechnik I (Wintersemester 2017/2018). 2017.
- Jan Lunze: Regelungstechnik I. 11. Auflage. Springer Verlag, Berlin 2016, ISBN 978-3-662-52678-1.
- Heinz Unbehauen: Regelungstechnik I – Klassische Verfahren zur Analyse und Synthese linearer kontinuierlicher Regelsysteme, Fuzzy-Regelsysteme. Vieweg Teubner, Wiesbaden 2008, ISBN 978-3-8348-0497-6.
- Serge Zacher: Regelungstechnik für Ingenieure. Vieweg Teubner Verlag, 2011, ISBN 978-3-8348-9837-1.
Einzelnachweise